概要:コンベヤ上の部品をロボットがピッキングし、指定の位置へ配置。
まずは、ケースから。
概要:複数部品を自動で組み立て。
概要:製品の状態を検査し、不良品を排除。
概要:製品を自動で整列・積み付け。
概要:ロボットへの部品供給を自動化。
※本ページは、説明を目的に要点を整理しています。詳細は現場条件に合わせて設計します。
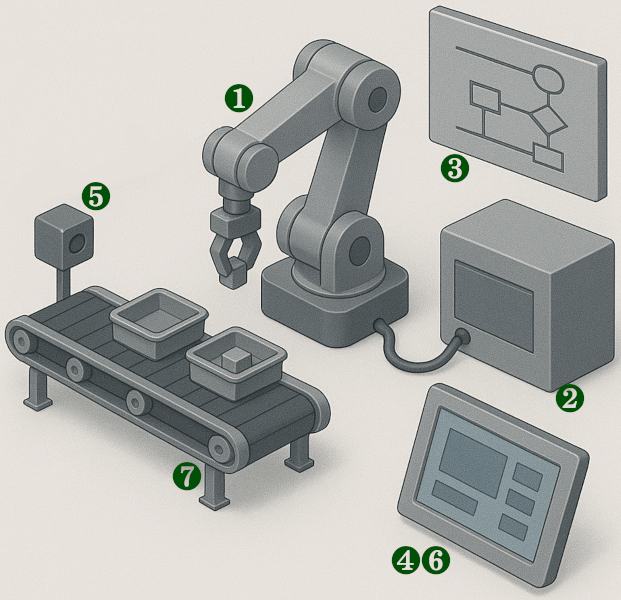
構成要素。
要素の役割が分かると、構成の取捨選択が速くなります。
ロボットアーム
PLC
ラダープログラム
ロボット用プログラム
センサー
タッチパネル
コンベヤ
役割を、整理する。
ラダープログラム
ラダープログラム
ロボット用プログラム
ロボット用プログラム
設備は、こう動く。
センサー → PLC → ロボット → 次工程。基本の流れを押さえると、構成の要点が見えてきます。
① センサー検知
部品の到着をセンサーが検出 → PLCに信号を送信
② ラダー制御
PLCが信号を受け取り → ロボットへ指令
③ ロボット作業
ロボットがプログラム通りに作業(例:ピックアップ)
④ 完了通知
作業完了の信号をロボット → PLCへ返送
⑤ 次工程へ
PLCが次の装置へ指令 (例:コンベヤ搬送)